Espańol
Roller Compactor
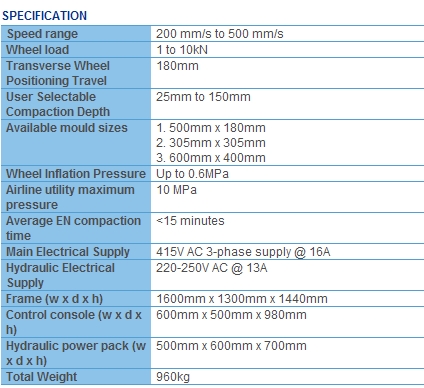
CRT-RCENLD-II – Large device EN roller compactor
Roller compaction is generally considered to be the best method of compacting asphaltic paving material in the laboratory. Slabs compacted with the CRT-RCENLD-II can be used in the “Large size” wheel tracker developed in France, cut into prismatic or trapezoidal specimens or cored for use in indirect tensile or axial loading tests.
The compactor can be configured for single or dual wheel compaction and wheel loads can be selected in the range 1 to10kN. A single wheel is used to compact 500mm x 180mm slabs for testing in the large-size wheel-tracker and the dual wheel configuration is normally used for compacting the 600mm x 400mm slabs that are sawn into smaller shapes for other tests.
The compactor is controlled and data acquired using dedicated software written using the industry standard LabVIEW graphical programming system. A user interface in the customer’s language can be supplied if requested. Compaction can be automatic, semi-automatic or manual. Compaction routines complying with EN12697-33 are included as standard and compaction data can be saved, printed or imported into a spreadsheet such as Excel. The user can also design and save custom compaction routines.
In automatic mode the user can choose whether to compact to a target mixture density or to carry out a standard compaction sequence. The required quantity of mixture is loaded into the mould and either the heavy or light compaction pattern is selected according to EN12697-33. The compaction pattern specifies the sequence of wheel loads and transverse positions of the wheel path across the mould. As the wheel moves backwards and forwards over the mould at constant speed, the base of the mould is incrementally raised by a precision jacking system to keep the surface of the mixture level with the top of the mould (see diagram). The magnitude of the increment can be specified before compaction begins or the user can change it during the compaction process. At intervals the motion is halted, the wheel raised and the wheel-path moved to the next transverse position before the wheel is lowered and compaction resumed. The transverse movements are carried out automatically and are chosen so that the wheel-paths overlap.
FEATURES
• Automatic compaction sequences complying with EN12697-33
• Manual and semi-automatic compaction procedures
• All compaction data saved to text files for optional analysis
•Integral safety cage and laser gate for easy access 305mm square moulds can also be used (with adaptor) to provide slabs for the small-scale Wheel tracker
• Moulds can be filled in or out of the compactor
•Supplied with mould trolley for moving between mixing and compaction zones of the laboratory
•Exceeds or complies with all EN12697-33 tolerances
SYSTEM ELEMENTS
Vertical movement of the mould base is achieved vertically with four linked screw-jacks which are driven by an electric motor. Height is measured with a linear potentiometer. Compaction load is applied using a hydraulic actuator with force feed-back via a load cell. Lateral wheel position is adjusted with a precision stepper motor and longitudinal wheel travel is generated using a robust endless chain drive by a powerful motor/gearbox.
Three sides of the compactor are enclosed in a steel mesh safety cage giving good all round vision. The front is open and protected with a light gate in order to give complete access to the mould and ensure complete safety.
System control, data acquisition and control gear is housed in a floor standing control console. A dedicated PC is supplied for system control. Users can set up comfortable and safe working positions as the PC screen and keyboard are located on a moveable arm. A separate compact hydraulic power pack with all valves and filters stands beside the compactor.
See also:
Roller Compactor
NAT Asphalt Testing System
Universal Servo-Hydraulic Test System
Four point beam fatigue test
Wheel tracker
Hamburg Wheel tracker
Wheel tracker EN12697-22 Large device CRT-WTENLD

